This research has been supported by the National Science Foundation under grants DMS 9706594 and DMS 0074160 and by the Air Force Office of Scientific Research under grant F49620-98-0161. It has been conducted jointly with Professor Monique Dauge of University of Rennes I, Rennes, France. DISCLAIMER: Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation or AFOSR.
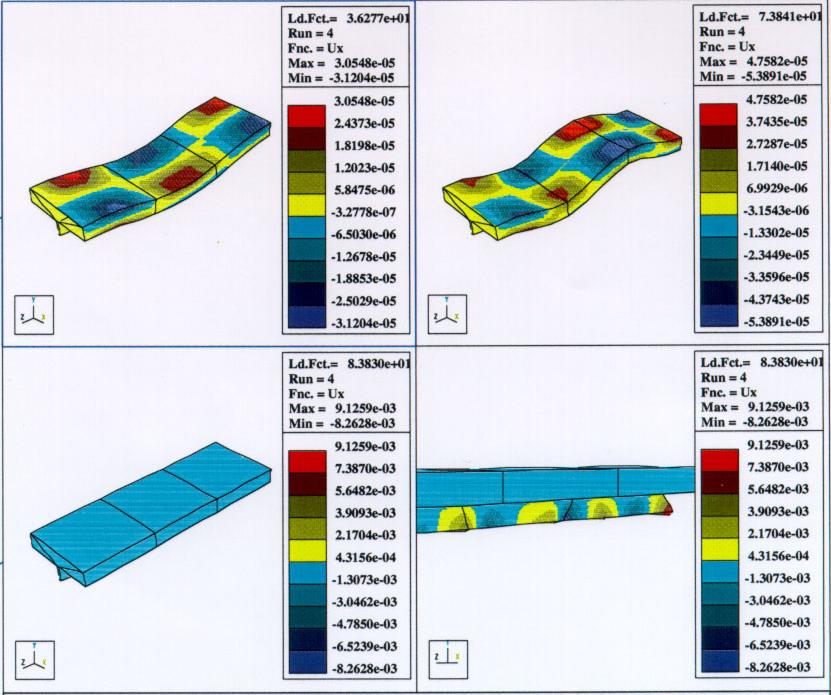
In the above picture, a plate (or flange) with a thin strip attached to its bottom (which acts as a stiffener) is pressed inwards by a force acting on its two ends in the direction of its longitudinal axis. If the force is not too large, the deformation of the flange will be very small, but once a certain threshold is crossed, the flange will buckle. Such buckling is a form of engineering failure, and engineers are often interested in finding the minimum force or loading under which it will occur. What is shown in the pictures above are the first three buckling modes, i.e. the deformed configurations of the flange after buckling has taken place.
Classical buckling formulations for plates usually use an idealized model for the plate called a Kirchhoff plate model, where the plate is considered so thin that its thickness approaches the limit of zero. However, it becomes difficult with such formulations to consider truly three-dimensional objects (for instance, the role played by the stiffener). For this reason, a recent formulation by Professor Barna Szabo and his group at the Mechanical Engineering Department at Washington University, St. Louis, MO, utilized the full three-dimensional plate rather than some reduced model. The resulting algorithm was implemented in the code Stress Check, and shown to accurately predict the minimum force that caused buckling in a variety of test cases.
However, engineers cannot test all possible situations to which an algorithm may be applied. As a mathematician, my goal was to find out if there might be some cases where the algorithm failed to give accurate results. Also, to mathematically prove that in all other cases, the algorithm did, in fact, give accurate results (the proof being general enough that it covered the widest possible class of cases that would be of engineering interest).
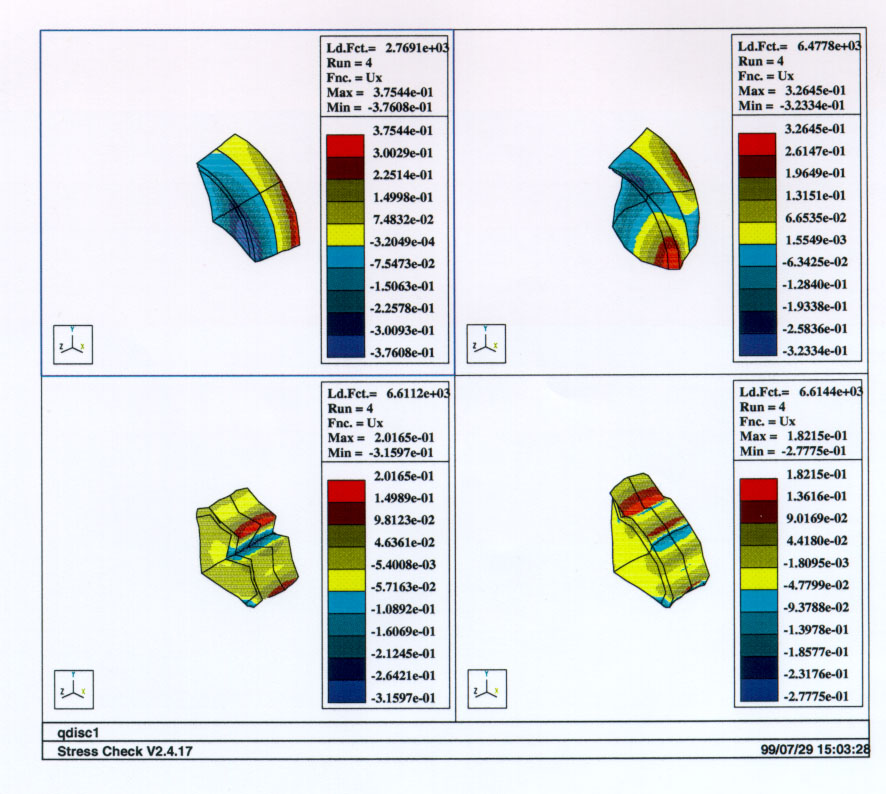
The first thing proved (jointly with Professor Monique Dauge of University of Rennes I, Rennes, France) was that if the plate (or other structure) was sufficiently thin, then the algorithm would give accurate results. Also, it was found that when the structure was too thick, then the algorithm returned buckling load predictions that were too low. The above pictures illustrate this. A circular disc is subjected to inward forces along its circumferential face. In the first picture, the first four buckling modes are shown when the thickness of the disc is 0.6 (the radius is 1, and only a quarter of the disc is shown). It turns out that the first two are true (and accurate) buckling modes, while the lower two (which have a markedly different character) are non-physical (or spurious) buckling modes. In the second picture, the thickness is increased to 1.4. Now, all four modes shown are non-physical, and the buckling force returned is much lower than the true one needed to buckle the cylinder.
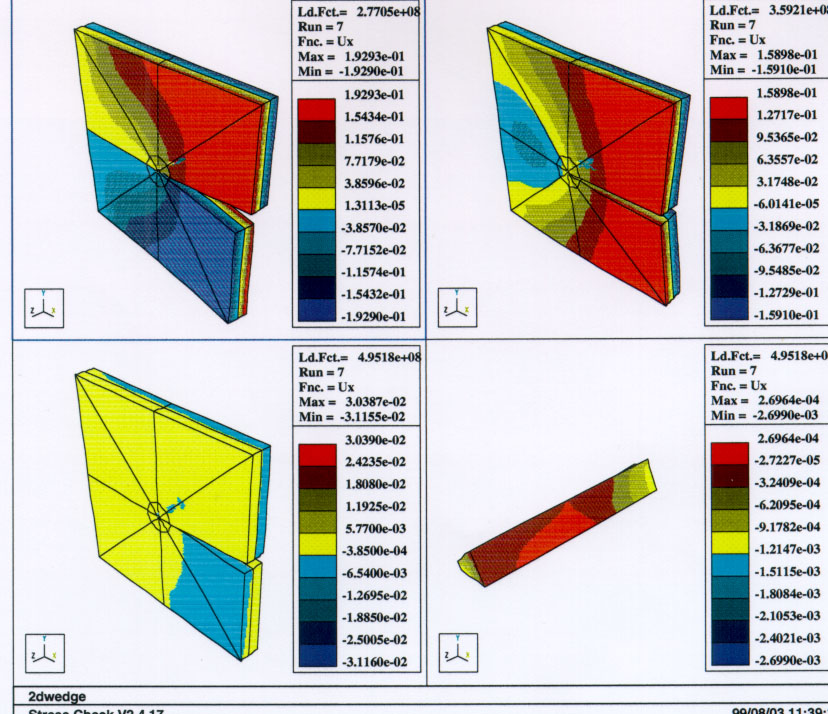
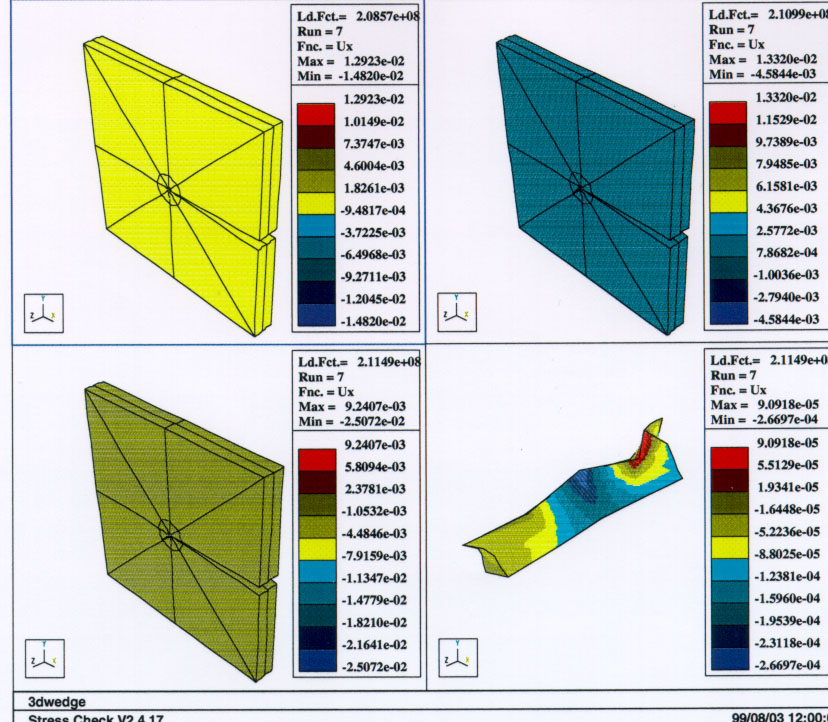
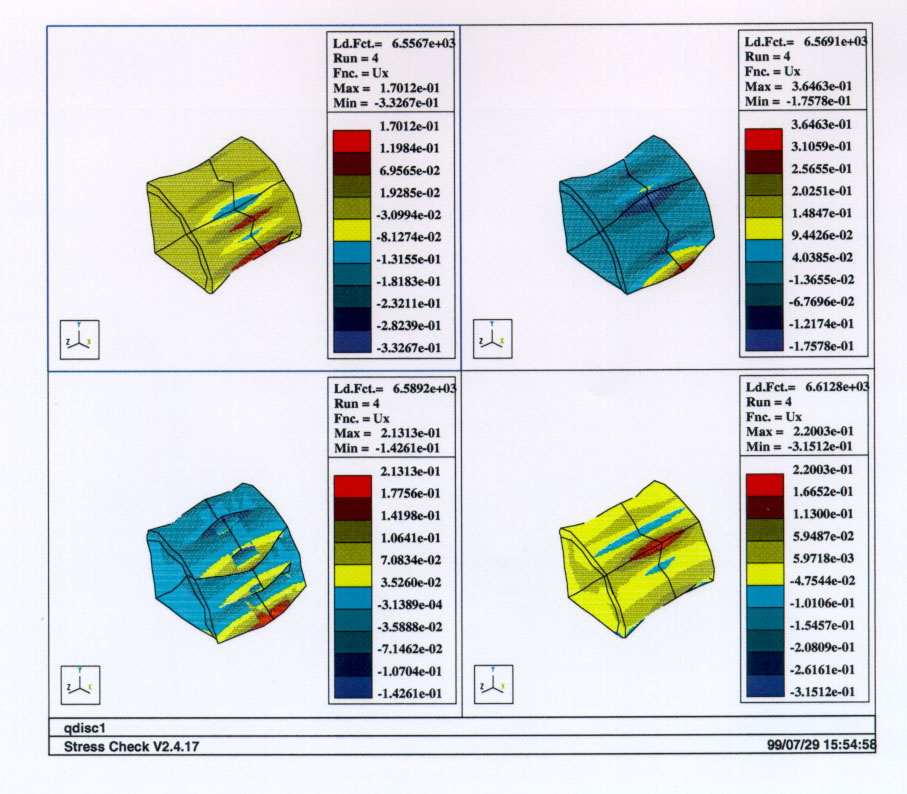
It turns out that if the structure has corners and edges (as is true of most real-life objects), another problem can arise, even if the structure is very thin. For instance, consider the cracked plate in the above pictures (the crack being a five degree notch cut into the side of the plate). Suppose the plate is subjected to a force which acts throughout its body, and is directed downwards in the top half and upwards in the bottom half. It is known that the resulting stress will be highly concentrated at the vertex of the notch, which is why the immediate area there is usually highly refined in calculations, to accurately capture this stress. Unfortunately, this refinement can have a negative effect where buckling is concerned – it can give rise to spurious buckling modes. In the first picture, the top two buckling modes are accurate, but the third one is not. The character of this third mode is again markedly different, with all the deformation taking place in the elements very close to the vertex (as seen in the blown-up detail). When the refinement around the vertex is increased further (second picture), all the calculated buckling modes turn out to be spurious (with the one of engineering interest being about 50% higher than the computed one). Again, all the `action’ is concentrated near the center with these spurious modes.
The above result help engineers by defining the limits for which the algorithm is useful. Fortunately, the cases where there might be a problem are either not of interest (such as very `thick’ structures) or can be easily avoided (such as over-refinement at vertices). Hence the reliability of this algorithm can be established.
General non-technical explanation of my mathematical research.